Understanding precision: accuracy, repeatability, precision
Sensor resolution
The term sensor resolution indicates the smallest quantity detectable by the position sensor. This value is the lower limit for the stage resolution.
Sensor resolution is also referred to as sensor sensitivity.
Sensor accuracy
The accuracy of a position sensor represents the absolute deviation with respect to a calibrated, metrologically traceable standard. Sensor accuracy does not necessarily relate to sensor resolution.
Sensor inaccuracy is mostly caused by the imperfectness of the sensor scale and by the alignment error of the sensor scale with respect to the axis of movement.
The sensor accuracy error is to a great extent repetitive and can be compensated for by means of a lookup table.
Stage resolution
Stage resolution is defined as the smallest, controlled mechanical displacement of a piezo positioning stage. Since our piezo stages work in most cases with ultrasonic piezo technology in combination with a dedicated driver, the term resolution always refers to the closed-loop resolution of a stage. The resolution is therefore affected by the sensor resolution, mechanical influences (friction, compliance, contact point nonlinearities...) and position control performance.
This value is the lower limit for the stage repeatability.
Other terms for stage resolution are minimal step size or minimal incremental motion (MIM).
Stage repeatability
Repeatability is defined as the range of positions attained when the stage is repeatedly commanded to one specific location under identical conditions.
Unidirectional repeatability: the ability of the stage to return to a given point, always coming from the same previously defined point. The value specified is the standard deviation of many moves to the same point.
Bidirectional repeatability: the ability of the stage to return to a given point coming from a random previous point. The value specified is the standard deviation of many moves from random directions to the same point.
The values given on the website concern the bidirectional repeatability, unless specified otherwise.
Stage accuracy
The accuracy of a stage is directly related to the sensor accuracy. This is a result of the direct-drive principle of our stages and the small distance between the position sensor and mounting surface.
Accuracy vs. repeatability
Accuracy is how close a stage can position to the actual (true) value. Repeatability is a measure of the stage’s ability to sequentially position to the same target value. It is important to understand that accuracy and repeatability are two different properties of a positioning system.
In a number of applications, the repeatability of a motion system is more important than the accuracy. Systematic errors can be taken into account and compensated, but the repeatability is the ultimate limit that is reached after all compensation.
Accuracy is also referred to as trueness. Other terms for repeatability are reproducibility or - slightly confusing - precision.

Error motion of a rotation stage
According to the ANSI/ASME B89.3.4 standard, the error motion of a rotary stage’s axis of rotation is defined as a change in position, relative to the reference coordinate axes, of the surface of a perfect workpiece, as a function of rotation angle, with the workpiece centerline coincident with the axis of rotation.
In other words, a rotary stage ideally has one degree of freedom, i.e. a rotation about the z-axis. However, as perfect rotary stages do not exist, any motion in the remaining five degrees of freedom is referred to as an axis-of-rotation error motion or simply error motion. Depending on the error direction, one can distinguish two radial contributions, one axial and two tilt or wobble contributions. Furthermore, the error motion of stage can be separated into a synchronous and asynchronous component. The error motion of a stage is often incorrectly referred to as stage runout.
A more elaborate explanation of these terms can be found here.
Error motion of a linear stage
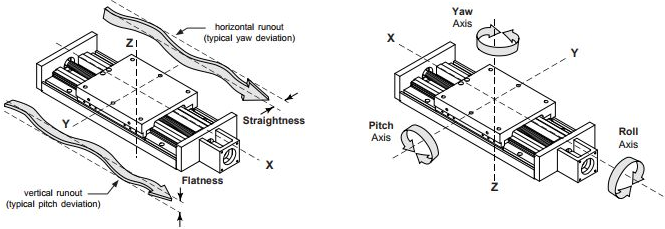
The error motion of a linear stage is the undesired motion, as a function of the stage position, in all five degrees of freedom other than the direction of motion. The error motion in the horizontal plane is referred to as straightness error, and the error in the vertical plane as flatness error. The angular error motion components in the different ortogonal directions are called pitch, roll and yaw.
Another term for the error motion of linear stage is the stage guiding error or travel error.