The difference between stages, actuators and motors
Reading time: 3 min
Introduction
At Xeryon we talk with customers from all over the world on a daily basis. We learn a lot from them about their applications and the challenges they face. But there are also some unclarities that we encounter on a regular basis during these discussions. We will handle one of those unclarities in this article: The confusion between the technical terms: stages, actuators and motors.
Actuator vs motor
The easiest way to approach this topic is by starting with the word “actuator”. This is basically any device that moves an object to a different position and thus “actuates the motion”. So this actuation device has to contain a motor AND some mechanical components to convert the motor movement into a usable motion and allow for easy mounting onto the movable object. Sometimes an actuator also contains electronic components.

Stepper motor

Actuator
There are many types of motors that can be used to drive an actuator like stepper motors, DC motors, servo motors, etc. If you want to know more about the different types of motors that are used in actuators, have a look at this page.
The term “actuator” can be used for rotary motion as well as for linear motion but mostly the term is used for linear motion. Most types of motors generate a rotary motion by design and thus do not require extra components to be integrated into a system. For linear motion the story is different: Almost always some extra components are needed to convert the rotations of the motor into a linear motion and to bridge the gap between the motor and the rest of the setup.
Actuator vs Stage
So now the difference between a motor and an actuator is clarified we can jump to the next point: How about the difference between an actuator and a stage?
There is no formal definition but generally an actuator is used to push or to pull onto an object that has its own guiding system (rail guidings, bearings, hinge, …) while a stage has an integrated guiding system and thus can carry the full weight of the payload. Another way of looking at this is that an actuator only takes and delivers forces into the actuating direction, while a stage can take forces in all directions. This means that if an actuator is used instead of a stage, the payload needs to be mounted on a dedicated guiding and a structure with sufficient stiffness. This can be a challenge for the engineer, designing the system.

Push/pull actuator on a
"guided" window

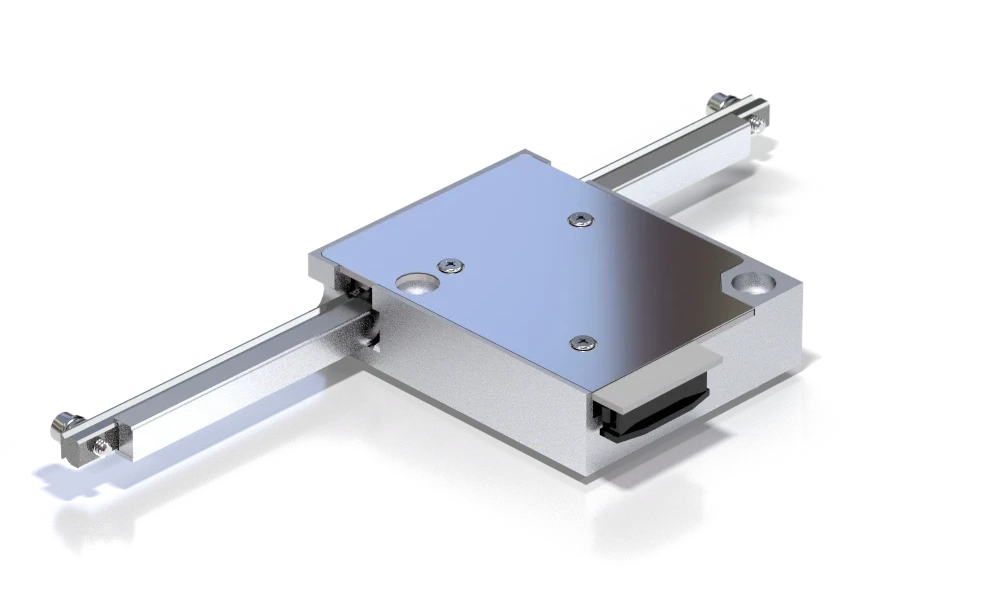
Stage with integrated
guidings and a piezo motor
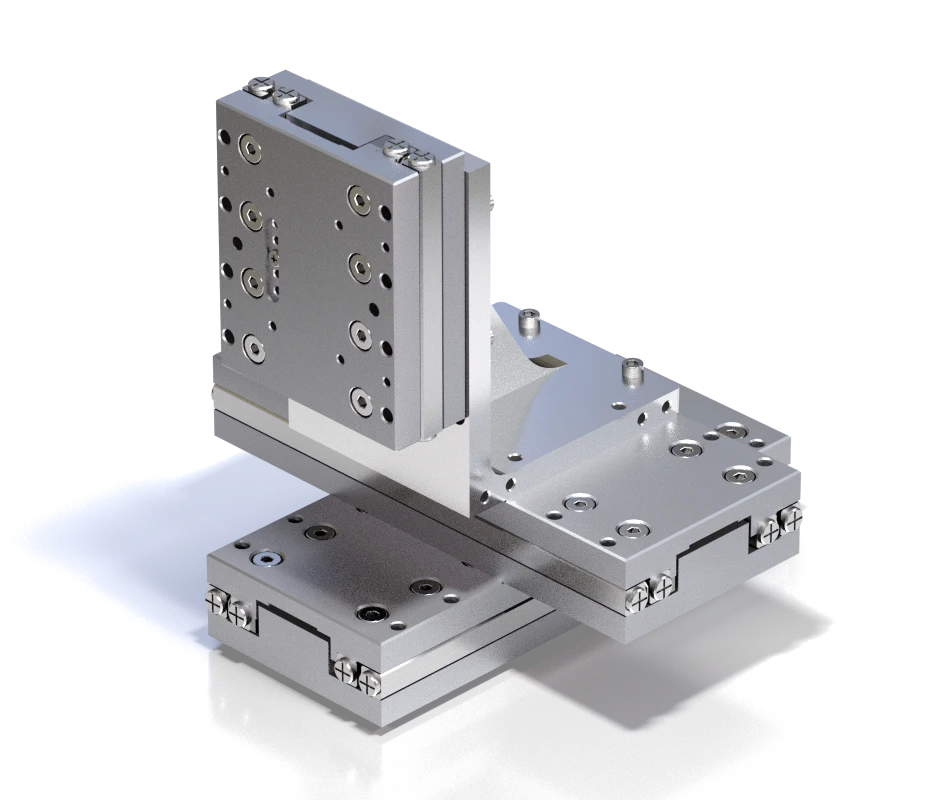
Because of this difference, typically a stage is bulkier than an actuator as the structure needs to be able to bear the weight of the payload and also contains sturdy guidings to avoid any unwanted movements into other axis of motion. These unwanted movements are typically referred to as “pitch”, “roll” and “yaw”. The better the guiding system and the higher the stiffness of the stage, the lower these unwanted motion errors are.
Unfortunately today you will find many products on the market that are referred to as “actuators”, while they actually are “stages”, as they fully support the payload in all directions. In the world of micro-actuators and micro-stages there is more consensus on the nomenclature.

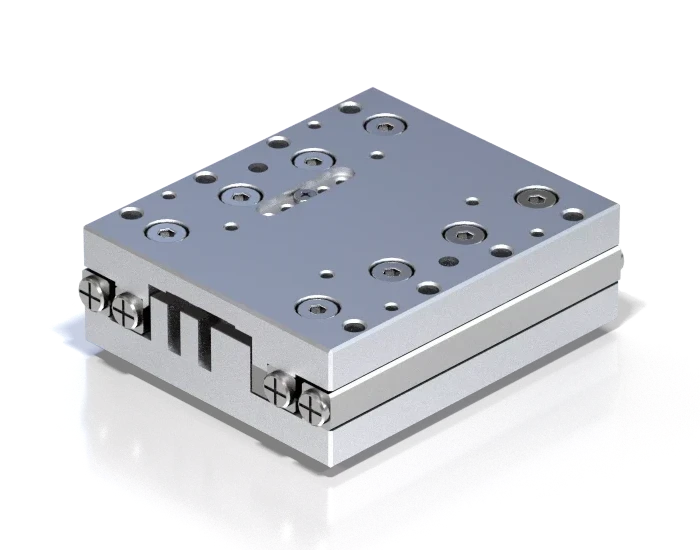
"Actuator" with all-axis support
Give us a call or send us an email. We are more than happy to assist you!