The ultimate overview of micro actuators
Reading time: 8 min
In this overview we will discuss the different types of micro actuators on the market. The focus of this analysis will be on the linear micro actuators, meaning linear actuators that fit within the palm of your hand. Typically these kinds of miniature actuators are used in robotics, medical devices, consumer electronics and industrial automation projects. They are made to be as compact as possible, to be affordable and to reach high enough travel speeds to be useful in many applications.
A distinction needs to be made between the actuating mechanism and the motor that drives the actuator. For instance, a ball screw actuator can contain a brushed DC motor, a brushless DC motor or even a stepper motor. For this reason we start with a quick overview of the different motors that you will find in micro actuators. This is a simplified motor overview as there are many subtypes of each principle. The focus of this overview is on the actuators more than on the motor types but it will give you a rough idea of main categories of small linear actuators.

Micro actuators: motor types
Brushed DC motor
The simplest motor design in micro actuators is the brushed DC motor with a permanent magnet. You find it in cheap products, toy cars, etc. A DC voltage is sufficient to drive the motor, which contains a permanent magnet in the stator of the motor. The brush contacts make the connection with the rotor. It is one of the oldest motor designs and is still in use today. It is super cheap but wears down quickly.

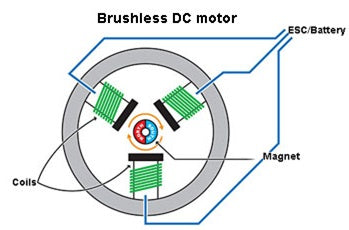
Brushless DC motor
A more advanced motor principle is a brushless DC motor. The name is extremely confusing as a brushless DC motor needs to be driven by three sine waves, so an AC signal. Some models have permanent magnets in the stator and others use electromagnets but both of them need sine waves in the rotor to create a “rotating field”. In many DC applications, a DC/AC converter is used to generate the needed AC signal. These motors can generate more torque than the brushed DC motors and are less susceptible to wear because of the absence of contact brushes.
Stepper motor
If it is required to take controlled small steps (without the use of position encoders) a stepper motor is an interesting option for micro actuators. The rotor contains permanent magnets and the stator contains electromagnets. The rotor has many poles and aligns itself with one of the poles of the stator. Each time a different stator pole is excitated the motor rotates a little bit (= one step). Stepper motors are very reliable and have a long lifetime but they cannot deliver high speeds or very stable speeds. A stepper motor is really a positioning motor and has been one of the only options for precise positioning in a time where servo motors were not developed yet.

Servo motor
A servo motor is not really a motor principle. It is basically any DC or AC motor that has an integrated position feedback system. By feeding the position information back to a controller, a closed-loop control system can be created. This allows for exact positioning of the motor with high precision. The precision is dependent on the resolution of the position sensor and the motor. A servo motor can rotate to a specific position but can also take small steps with a high repeatability.
Types of micro linear actuators
Rack and pinion actuator
Rarely used in precision applications, the rack and pinion actuator is simple and affordable. A rack is moved back and forth by a pinion with a gear that drives the rack. The pinion can be driven by any kind of motor. The rack can be made out of metal or even out of plastic to further reduce the price (for toys, etc.). The downside is the play and the friction in the system. Because of the friction the gear and the rack teeth wear down fast resulting in a lot of backlash (“play”). Rack and pinion actuators can be kept compact (depending on the motor that is used).


Lead screw actuator
The lead screw concept is one of the simplest yet sturdiest designs possible for micro actuators. Imagine a nut on a bolt. Now rotate the nut while you hold the nut at the position and the bolt will slowly move up or down. You will find these actuators in low budget applications or applications that require large forces, like drill presses. The motor inside can be a brushed or brushless DC motor or a stepper motor. A lead screw actuator is cheap but is slow and has a lot of friction. Because of the friction a larger motor is needed to drive the actuator. Thanks to the high friction, many lead screw actuators are self locking when there is no power. Micro actuators with lead screws are bulky because a strong motor is needed to overcome the friction. Most compact linear actuators are ball-screw designs instead of lead-screw.
Ball screw actuator
A ball screw actuator is the improved version of a lead screw actuator. The contact between the shaft and the nut is handled by recirculating balls instead of a sliding contact. Ball screw actuators can be combined with different kinds of motors. Micro actuators with a ball screw are affordable but can be bulky because of the motor sitting next to the shaft. Most models cannot achieve speeds higher than 50 mm/s. Imperfections in the screw lead to play and backlash. In most micro linear actuators, this backlash is in the order of 0,1 mm. For applications that really require a small form factor, a ball screw actuator often is too bulky.

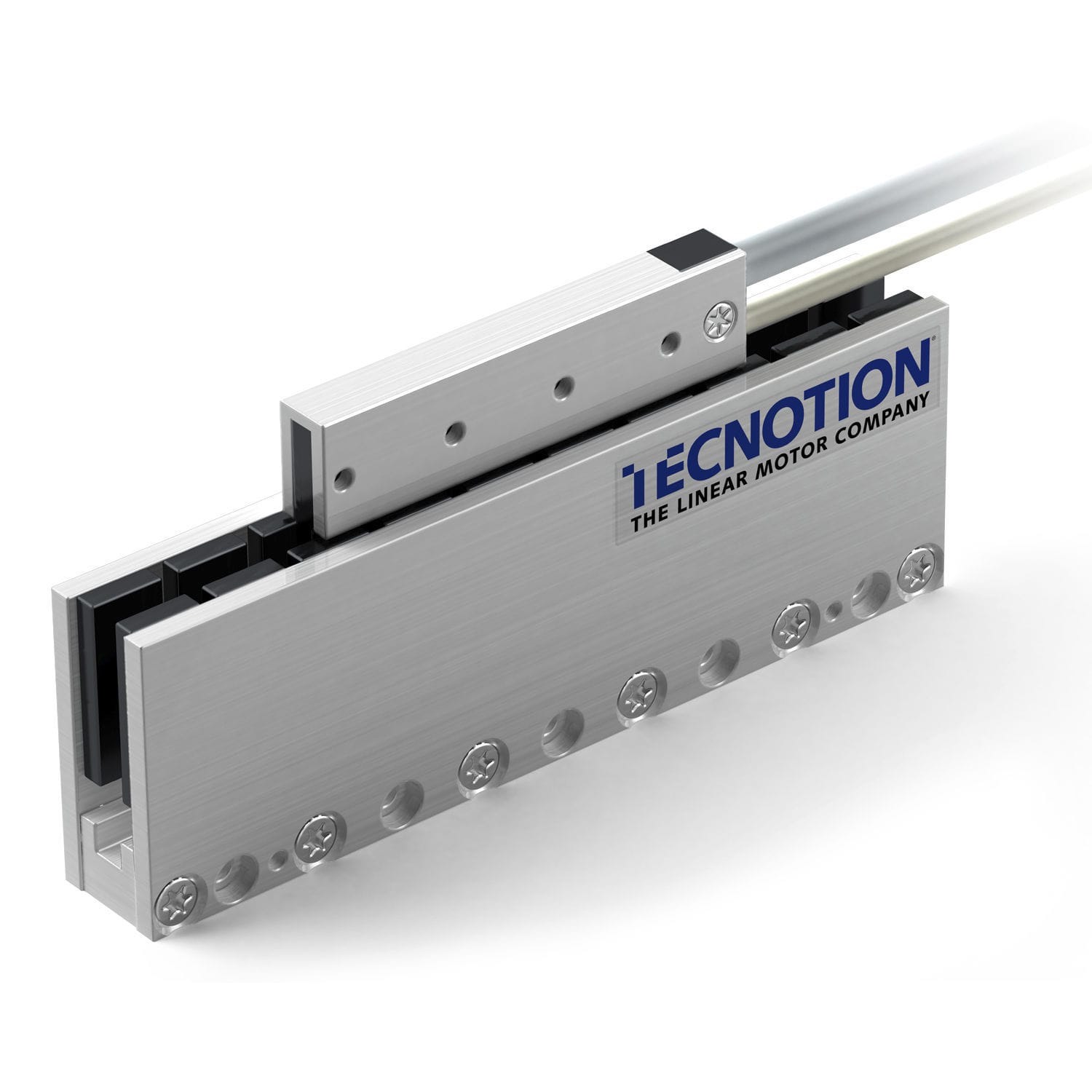
Linear motor
A linear motor is a different motor principle than the motors discussed so far in this document. All motors so far create a rotation of some kind which is translated into a linear motion by a transmission component, like a rack or a threaded shaft. A linear motor is an electromagnetic motor that creates a linear motion by default without any transmission components. The design resembles a brushless DC motor but the (permanent) magnets are not put in a circle but in two straight lines. They form a linear stator. The moving part of the motor contains windings and needs multiple sine waves to be driven, just like a brushless DC motor. By the nature of the design a linear motor is very suitable to be used as a linear actuator. But there is a challenge: Linear motors are bulky and heavy because of the magnets and are also more expensive than ball screw actuators. They can deliver a lot of force and achieve high speeds. When powered there is always some jitter (small vibrations) to stay in position. When unpowered they are not self locking.
Voice coil actuators
A voice coil actuator is basically the same design as a linear motor, but with one winding instead of a series of multiple windings. The outer shell is a (permanent) magnet and the inner part slides in and out of the shell because of the magnetic field. By changing the current in these windings, the speed and force of the voice coil actuator can be altered. Voice coils are precise and durable, but unfortunately they have two major downsides: They are not suitable for long travel ranges, because of the use of only one winding, and they are expensive. Most voice coil actuators have strokes of less than 10 mm.


Solenoid actuators
The solenoid actuator is another very basic linear actuator principle. An electromagnetic coil pulls a metal core inside the shell. A solenoid is super cheap but is an all-or-nothing actuator because the more the metal core slides inside the electromagnet the harder it is pulled upon. So it accelerates until it hits the end stop. Typically the actuator is moved back by a mechanical spring. A solenoid can only be fully opened or fully closed without any speed control, making them unsuited for many applications where other miniature actuators are used.
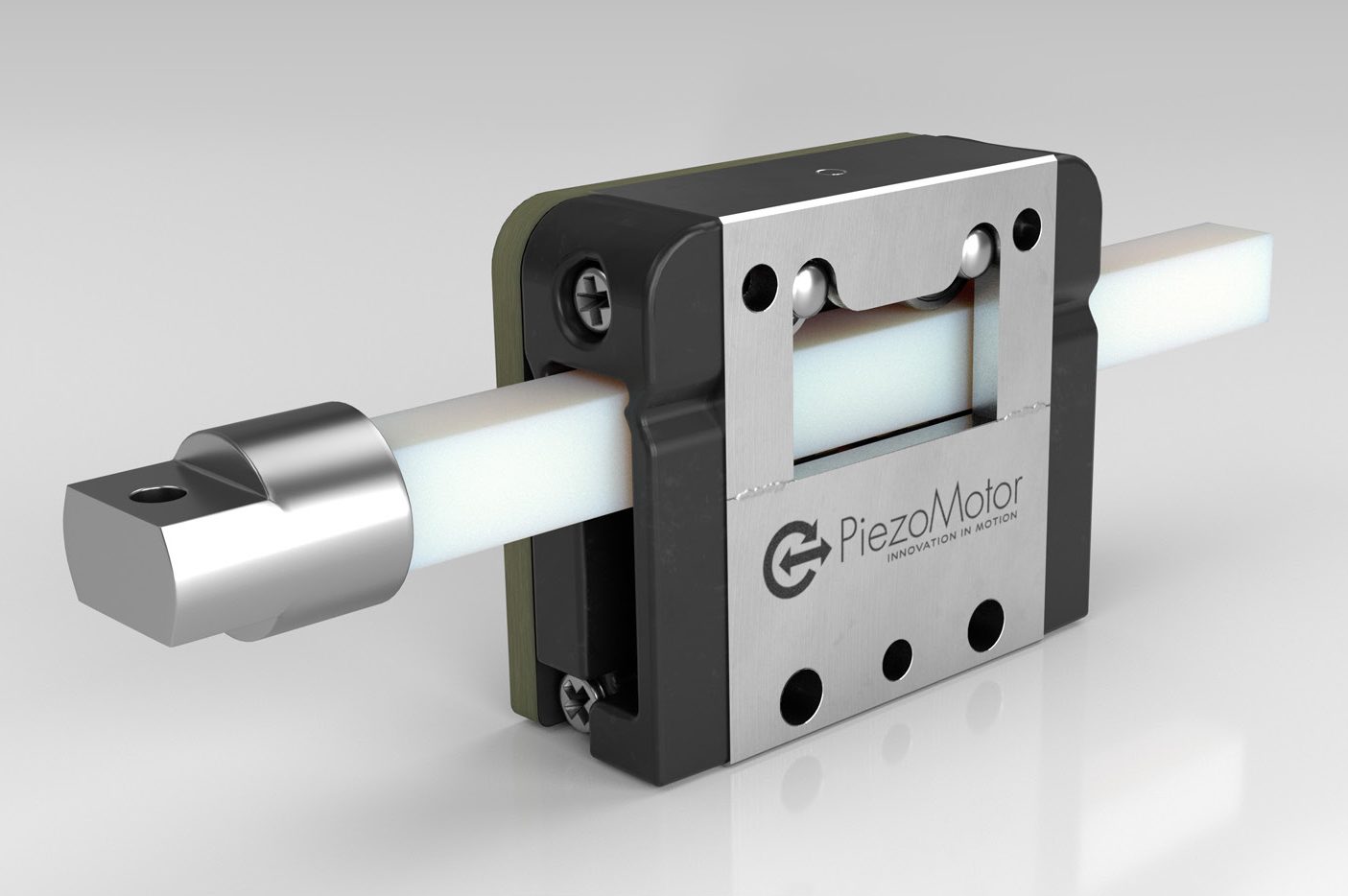
Stick-slip piezo actuators (inertia piezo)
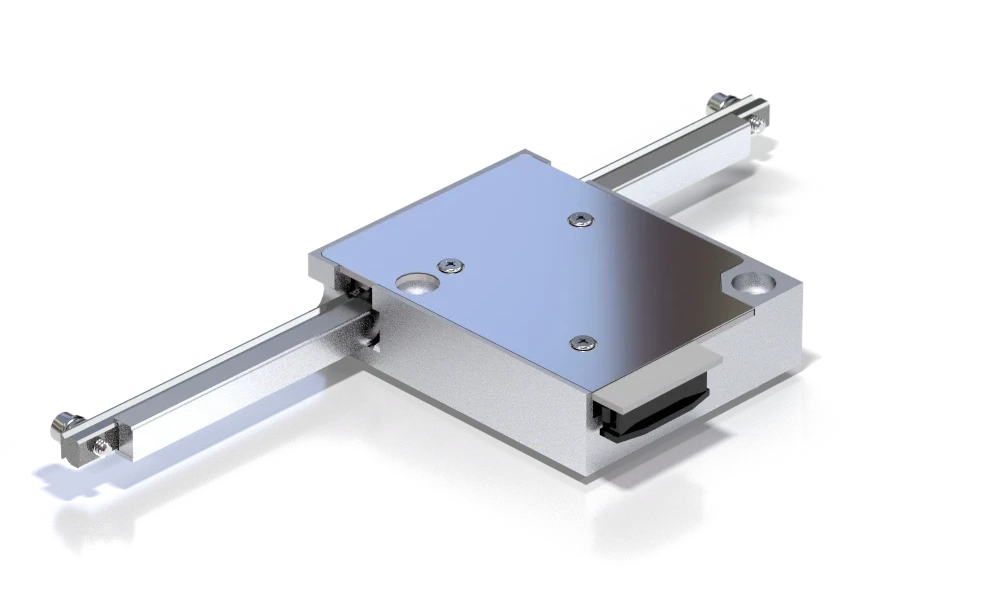
If you’re not familiar with the principle of piezo motors, make sure to read our other pages on the fundamentals of piezo motors. The first type is a stick-slip piezo motor. It moves back and forth at a high frequency against an object that needs to be moved or rotates. It sticks in one direction but slips in the other, resulting in a very small net displacement but also in a short lifetime of the motor. If this kind of motor is used on a lead-screw-like design, you end up with a piezo actuator, like the one in the picture below. They are extremely precise but move slowly (< 2 mm/s). Typically these kinds of actuators don’t have travel ranges longer than 50 mm. They are very expensive and mostly used in scientific applications.

Piezomotor walking piezo (stepping piezo)
On our page on the basic principles of piezo motors you will also find the walking piezo (or stepping piezo). In contrast with the stick-slip principle described above, the walking piezo concept contains multiple piezo elements that extend one after the other, allowing for a retreat action without friction. The result is a better lifetime and higher maximum speed (< 30 mm/s). The complex ballet of multiple piezo elements drives up the price. As in most models the driving rod needs to be made out of ceramic material, the travel length is limited. A walking micro piezo actuator travel range typically is limited to 20 mm.
Ultrasonic piezo actuators
The piezo actuators described above are precise but slow. For short travel ranges this can be acceptable but if you need to travel 300 mm you do not want to wait two minutes for the actuator to extend. In that case an ultrasonic piezo actuator could be a solution. We have a page describing the technology of ultrasonic piezo motors in detail and one covering our patented ultrasonic piezo motor itself. In short, in this design, the piezo element vibrates in resonance, which increases the extensions and contractions of the piezo element.
The result is a travel speed of 1000 mm/s and noiseless motion. Stick-slip piezo systems are characterized by a typical buzzing noise as they vibrate within the audible spectrum. Ultrasonic piezo actuators vibrate in the 100 kHz range, far away from the audible spectrum. In contrast with the walking piezo, only one piezo element is used so a very compact design is possible. The lifetime of an ultrasonic piezo actuator can be up to 1000 km, about 100 times better than a stick slip system. Piezo actuators are available with an integrated closed-loop controller unit, so no external electronics are required. The travel range is virtually unlimited as the traveling rod can be cut at any length. Ultrasonic piezo actuators are the smallest high speed actuators available when a travel range of more than 10 mm is required.

Comparison of micro actuators
Disclaimer: The overview below focuses on the smallest models of each type of actuator. Some of these technologies can deliver high forces but then they are so large they don’t qualify as a micro actuator anymore.
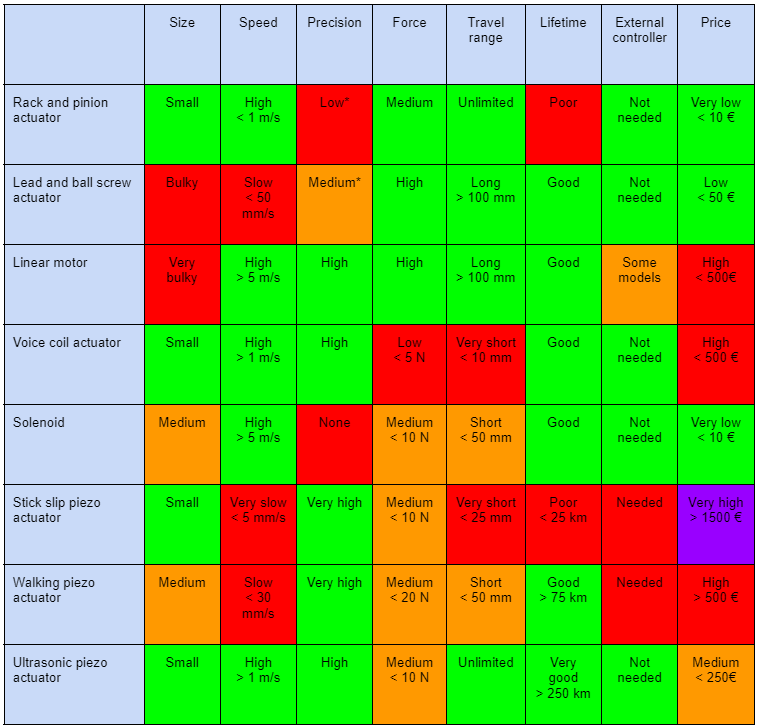
* The precision level and controllability is strongly dependent on the type of motor that is used inside the micro actuator