What is open-loop vs closed-loop?
Reading time: 5 min
In position control, we often speak about open-loop or closed-loop control. What does this mean exactly? What are the main advantages of each system? That’s what we discuss in the following article.

In general, open-loop control in motion systems means that there is no position feedback of a moving object. Closed-loop control means that there is some kind of position information that is fed back to the motion controller of a system and that is used in the positioning process. Xeryon specializes in ultrasonic piezo-motors, but the principles you read below apply to all kind of positioning systems, like linear motors, brushless motors, stepper motors, etc.

Most systems that are used to position or to move an object are aiming to reach a desired position with an acceptable precision (position certainty). The easiest way to make sure that a movement stops at a desired position, is to create a physical stop. This can be some kind of end-switch or even just a blocking object that stops the motion. This is an easy solution if you always need to move between the same two positions and if the drive mechanism (the motor) of your motion system allows this kind of stopping.
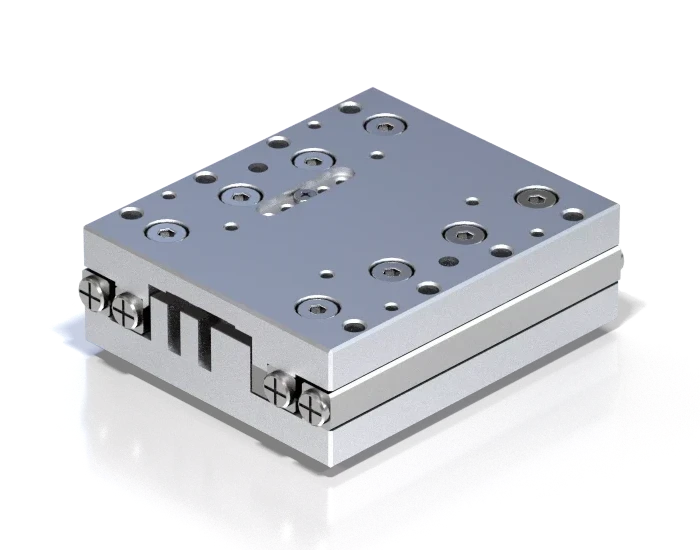
But imagine that you don’t always want to go to the same position? In an open-loop system you can’t know where you are exactly because you don’t have any information on your actual position. But, dependent on the kind of motor you are using, you can “count” the use of the motor and assume that it moves a certain distance for each “count”. For example, in a simple DC motor you could count the number of seconds a motor is used and then make an assumption on the movement you do per second. This would give you an estimate on the traveled distance if you multiply the travel distance per second with the time passed. Or in a stick-slip piezomotor, you could count the number of piezo vibrations. If you know that one cycle is about 1 nanometer of movement, you would have a good idea on your position by counting the vibrations. Xeryon also used this kind of control in the open-loop version of the XLA micro-actuator, resulting in a precision level of 3 µm without the need of a position sensor.

The big advantage of an open-loop system is the price. You don’t need to buy any position encoders (sensors) and the controllers are cheaper as well. Typically this will also save you a bit of space, if you are looking for very compact solutions. But the big disadvantage is that you are assuming your position. You can give a command to a motor, but you don’t really know that it is actually moving. And even if it is moving, you can never be sure that the traveled distance is what you assumed. Imagine that, because the pulses came too fast or the load was too high, a stepper motor slipped a bit, your assumption would be wrong and you would never know.
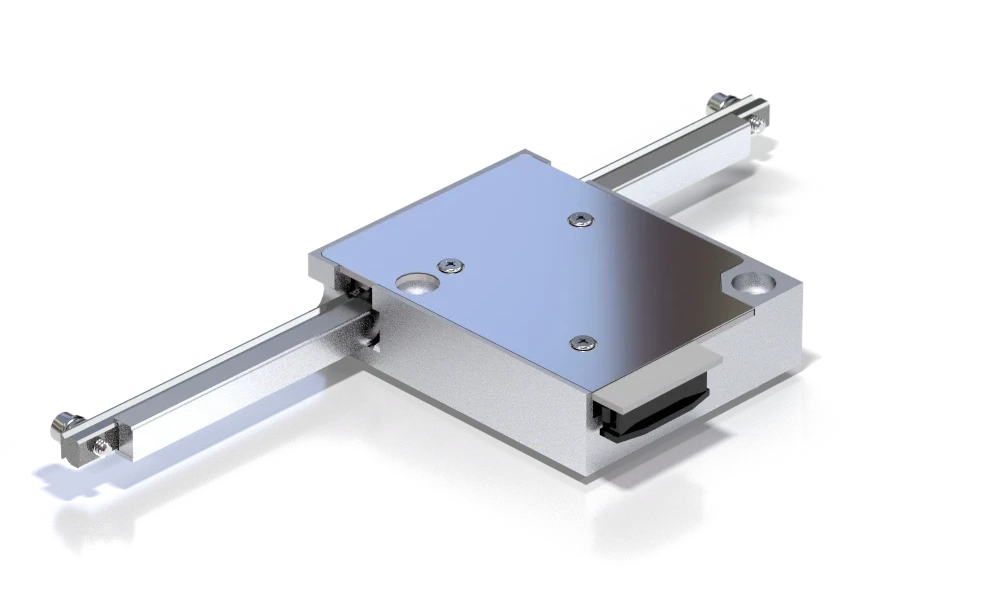
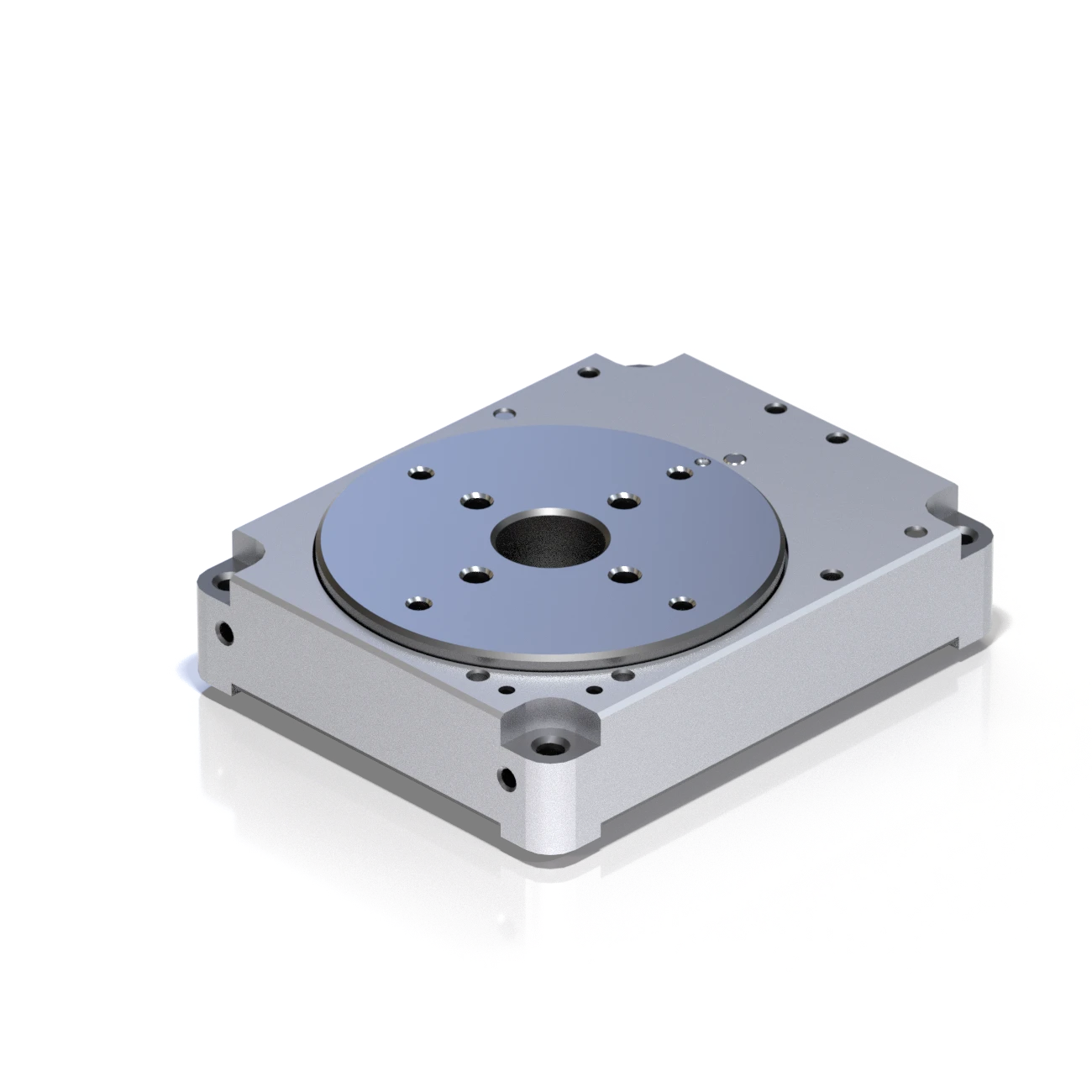
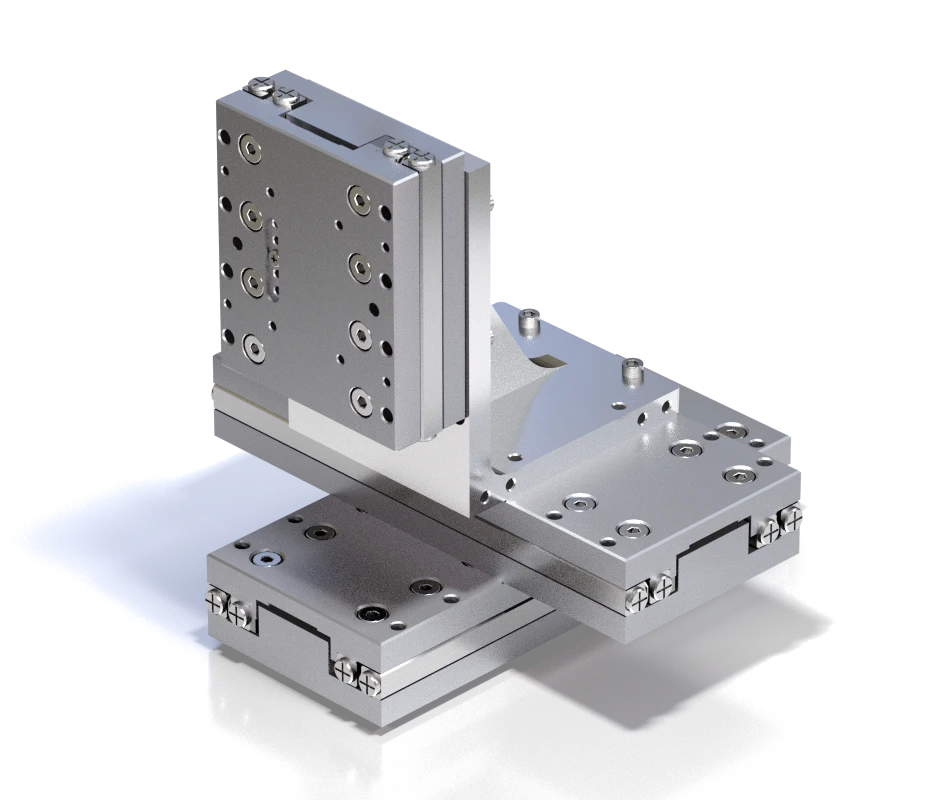
This is where closed-loop control comes into play. In this kind of systems, there is a position sensor, that feeds back the actual position of a moving object to your control system, multiple times per second. And your controller uses this to slow down when you are approaching the desired position. This position sensor, also called position encoder, can be built in your motion system, like in the Xeryon XLS linear stages (internal position feedback). But it’s also possible that the position feedback comes from other equipment in your setup that feeds back the position to the controller (external position feedback). Imagine that you are rotating a mirror with a rotary stage that doesn’t have an integrated encoder, but the system that uses the mirror can detect the actual position and send this position information to your control system: In this case you are using a motion system that doesn’t have an internal position encoder but functions in a closed-loop control, thanks to the external position feedback.


But a lot of closed-loop motion systems have an integrated position sensor that continuously feeds back the position. How does this work? There are two kinds of sensors: incremental sensors and absolute sensors. Let’s start with the incremental sensors: they need a “zero point” (index point), and they start counting small lines that pass by when the sensor starts moving. It’s a bit similar to the kilometer boards that you find on a highway that count the kilometers. Typically, there are a number of physical lines, but to have a very accurate position, this typically is not enough, so with special electronics these lines are being interpolated during the motion to create many more “virtual” lines, resulting in a higher resolution. So basically the sensor counts the number of lines that pass by during the motion. When you know the distance between the lines and you know how many lines have passed, you know the distance you have travelled. These sensors can be optical, inductive or magnetic. Xeryon offers 4 position sensor resolutions: 1250 nm, 312 nm, 78 nm and 1 nm. Xeryon uses optical sensors for the highest precision stages because they tend to be the most accurate and uses inductive sensors for the medium precision stages.
What is the disadvantage? You need a zero point, and you start counting from there. So if your zero point is wrong, your position is wrong. And if you miscount some lines, your position is wrong as well. Imagine that you turn off a sensor, then you move your actuator, and then you turn it on again: this is something an incremental sensor cannot detect. If you want to be 100% sure about your position, you need an absolute sensor. In this kind of sensor, each position line has a unique identifier that tells you the exact position it is associated with. The problem is that these encoders are much larger, so they cannot be used for the stages and micro-actuators that Xeryon produces. Also, these encoders are very expensive. You will find them in some very specific equipment, but typically not in precision stages and actuators.